Ferdinand91
Themenersteller
Hallo,
ich habe mich an eine Selbstbau Barndoor-Montierung gemacht. Anleitungen und Anregungen dafür gibt es im Internet ja sehr viele. Da ich allerdings ein großes Arsenal an Lego-Technik habe, dachte ich mir die Montierung über einen Lego Motor anzutreiben. Als Polsucher möchte ich die Kamera selbst verwenden. Doch dazu später mehr.
TEIL 1: Die Montierung mit Lego-Antrieb
Die fertige Montierung sieht so aus:

Holz und Schrauben haben etwa 30€ gekostet. Das ist doch eine nette Alternative zu den erhältlichen Trackern, die mindestens 200€+ kosten?
Der schwierigste Teil war, den Lego-Motor so umzusetzen, dass die Barndoor entsprechend der Erdrotation geöffnet wird. Hierzu kurz meine Rechnung:
Die Erdrotation beträgt 360° in 23h 56min 4,1s. Eine Nachführung über beispielsweise 16 Minuten bedeutet eine Winkelbewegung von etwa 4,01°. Über die Formel für das Bogenmaß kann ich die resultierende Strecke berechnen, um die die Barndoor am äußeren Punkt geöffnet werden muss, um diese Winkelbewegung zu machen. Hierfür erhalte ich 14,00mm bei einer Entfernung von 20cm zur Scharnierachse.
Mit den Lego-Technik Teil Nr. 3743 "Gear-Rack" kann ich mit einer Zahnradzacke eine Bewegung von 3,2mm erzeugen. Mit einem 8-zackigen Zahnrad bedeutet das eine Hebelbewegung von 25,6mm pro Umdrehung. Für die gewünschten 14mm benötige ich also ~0,55 Umdrehungen pro 16 Minuten oder umgerechnet in 0,03418 rpm (mit exakten Zahlen gerechnet). Der kleine rote 9V Lego-Motor hat 30rpm. Ich brauche also eine Zahnradübersetzung von 1:878. Das erreiche ich ungefähr mit folgender Konfiguration:

Link zur Webseite: http://gears.sariel.pl/
Die 1:878 erreiche ich zwar nicht exakt, aber es reicht aus, wie ein Test gezeigt hat. In 16 Minuten wird eine Hebelbewegung von genau 14mm erreicht.
Mit einem 300mm Teleobjektiv an APS-C habe ich die Laufruhe des Systems getestet. Bei der Beobachtung im Live-View mit voller Vergrößerung konnte ich kaum Vibrationen durch den Motor wahrnehmen und die Bewegung ist absolut gleichmäßig.
Zur Ausrichtung der Montierung zum Himmelspol wird normalerweise ein Polsucher verwendet, dessen Achse parallel zur Scharnierachse ist (entspricht Rektaszensionsachse). Ich habe mir aber ein System ausgedacht, um die Kamera als Polsucher zu verwenden. Im Live-View+Vergrößerung will ich den Himmelsnordpol anhand vom Polarstern exakt anzielen. Voraussetzung ist, dass die optische Achse der Kamera exakt parallel zur Scharnierachse ist. Dafür habe ich auf dem oberen Brett eine zweite Bohrung zur Befestigung der Kamera ohne Kugelkopf.

Die Kamera muss also nur entsprechend nach rechts oder links gedreht werden, bis die Blickrichtung exakt der Scharnierachse entspricht. Die Kalibrierung der Kameraposition hierfür folgt im zweiten Teil.
ich habe mich an eine Selbstbau Barndoor-Montierung gemacht. Anleitungen und Anregungen dafür gibt es im Internet ja sehr viele. Da ich allerdings ein großes Arsenal an Lego-Technik habe, dachte ich mir die Montierung über einen Lego Motor anzutreiben. Als Polsucher möchte ich die Kamera selbst verwenden. Doch dazu später mehr.
TEIL 1: Die Montierung mit Lego-Antrieb
Die fertige Montierung sieht so aus:
Holz und Schrauben haben etwa 30€ gekostet. Das ist doch eine nette Alternative zu den erhältlichen Trackern, die mindestens 200€+ kosten?
Der schwierigste Teil war, den Lego-Motor so umzusetzen, dass die Barndoor entsprechend der Erdrotation geöffnet wird. Hierzu kurz meine Rechnung:
Die Erdrotation beträgt 360° in 23h 56min 4,1s. Eine Nachführung über beispielsweise 16 Minuten bedeutet eine Winkelbewegung von etwa 4,01°. Über die Formel für das Bogenmaß kann ich die resultierende Strecke berechnen, um die die Barndoor am äußeren Punkt geöffnet werden muss, um diese Winkelbewegung zu machen. Hierfür erhalte ich 14,00mm bei einer Entfernung von 20cm zur Scharnierachse.
Mit den Lego-Technik Teil Nr. 3743 "Gear-Rack" kann ich mit einer Zahnradzacke eine Bewegung von 3,2mm erzeugen. Mit einem 8-zackigen Zahnrad bedeutet das eine Hebelbewegung von 25,6mm pro Umdrehung. Für die gewünschten 14mm benötige ich also ~0,55 Umdrehungen pro 16 Minuten oder umgerechnet in 0,03418 rpm (mit exakten Zahlen gerechnet). Der kleine rote 9V Lego-Motor hat 30rpm. Ich brauche also eine Zahnradübersetzung von 1:878. Das erreiche ich ungefähr mit folgender Konfiguration:
Link zur Webseite: http://gears.sariel.pl/
Die 1:878 erreiche ich zwar nicht exakt, aber es reicht aus, wie ein Test gezeigt hat. In 16 Minuten wird eine Hebelbewegung von genau 14mm erreicht.
Mit einem 300mm Teleobjektiv an APS-C habe ich die Laufruhe des Systems getestet. Bei der Beobachtung im Live-View mit voller Vergrößerung konnte ich kaum Vibrationen durch den Motor wahrnehmen und die Bewegung ist absolut gleichmäßig.
Zur Ausrichtung der Montierung zum Himmelspol wird normalerweise ein Polsucher verwendet, dessen Achse parallel zur Scharnierachse ist (entspricht Rektaszensionsachse). Ich habe mir aber ein System ausgedacht, um die Kamera als Polsucher zu verwenden. Im Live-View+Vergrößerung will ich den Himmelsnordpol anhand vom Polarstern exakt anzielen. Voraussetzung ist, dass die optische Achse der Kamera exakt parallel zur Scharnierachse ist. Dafür habe ich auf dem oberen Brett eine zweite Bohrung zur Befestigung der Kamera ohne Kugelkopf.
Die Kamera muss also nur entsprechend nach rechts oder links gedreht werden, bis die Blickrichtung exakt der Scharnierachse entspricht. Die Kalibrierung der Kameraposition hierfür folgt im zweiten Teil.





")





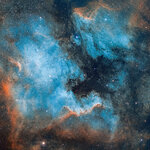
 Für richtige Aufnahmen fahr ich dann aufs Land.
Für richtige Aufnahmen fahr ich dann aufs Land.